The Hidden Costs of Gripping in Automated Production Lines
Why a "Functional" Gripper May Be Dragging Down Your Efficiency The Value of Upgrading Your Production Line with the RM-GB Electric Gripper
I. Gripping: The Underestimated Bottleneck in Production Lines
In the design of automated production lines, gripping and material handling are often regarded as "basic operations," receiving limited budget allocation and minimal engineering attention. However, as product precision requirements increase and product changeovers become more frequent, gripping systems have evolved from simple execution units into critical variables that directly impact yield and cycle time.
On real-world production lines, three challenges are encountered most often: changeover losses in high-mix production, workpiece damage during gripping, and the integration gap between gripping units and the wider automation system.
II. Challenge 1: Changeover Losses in High-Mix Production
Production Line Realities
- 3C electronics: The same line produces 6.1-inch displays in the morning and 6.7-inch displays in the afternoon, requiring manual fixture changes.
- New energy: Cylindrical, prismatic, and pouch battery cells share the same line, each requiring a different gripping method.
- Automotive electronics: ECU, sensor, and connector variants run in mixed-model production, while dedicated fixtures overflow the shop floor.
Consequences of Conventional Approaches
| Issue | Consequence |
|---|---|
| Mechanical changeover | 30 minutes to 2 hours of downtime per changeover |
| Fixture inventory | Management cost, space consumption, and version confusion |
| Manual adjustment | Dependence on operator experience and inconsistent results |
RM-GB Solution
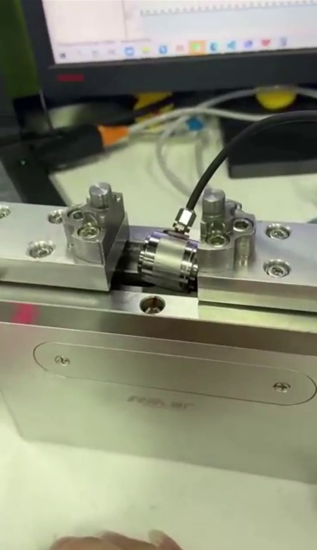
- Electric drive replaces pneumatics: No air supply station is required. Gripping force is motor-controlled, delivering greater stability than pneumatic pressure.
- Variable stroke: The open and close range is set via software to accommodate different workpiece sizes.
- Adjustable speed: Opening and closing speed can be fine-tuned via software to reduce high-speed impact.
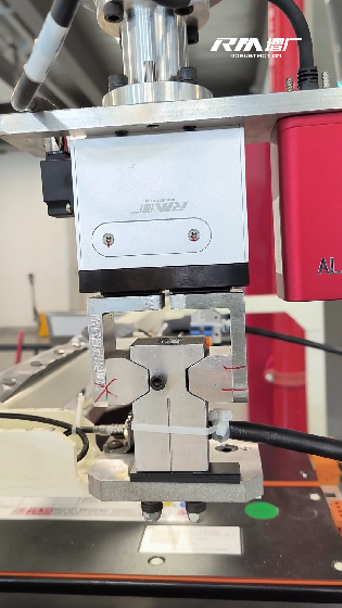
Core Value: A fundamental upgrade through electrification - more stable, cleaner, and easier to integrate than pneumatics. The production line gains a highly reliable gripping execution unit.
III. Challenge 2: Workpiece Damage During Gripping
Production Line Realities
- Soft PCBA: Pneumatic impact can cause component cracking and solder joint lift.
- Thin-wall structural parts: Excessive gripping force causes deformation, while insufficient force leads to drops.
- Precision electronic modules: Surface scratches and internal stress damage can appear after unstable gripping.
Limitations of Conventional Pneumatic Methods
- Gripping force is coarsely adjusted via pneumatic valves, with no force feedback.
- Impact during high-speed operation cannot be actively suppressed.
- Even at the same supply pressure, actual gripping force varies across different workpieces.
RM-GB Solution
- Servo closed-loop control: Gripping force is monitored and adjusted in real time, preventing overshoot.
- Constant-force approach: Speed decelerates upon workpiece contact, minimizing impact.
- Stable force output: Force is maintained at a constant setpoint throughout the gripping process, even when the workpiece deforms.
Core Value: Shifting from "adjusting air pressure by experience" to "setting force via parameters." This reduces workpiece damage and improves product yield.
IV. Challenge 3: The Integration Gap Between Gripping Systems and Automation Systems
Production Line Realities
- The robot completes positioning, yet the gripper's delayed response extends cycle time.
- The host system requires gripping status feedback, but pneumatic grippers only provide open and close signals.
- During digital transformation of the production line, the gripping unit becomes a data island.
Limitations of Conventional Approaches
| Requirement | Pneumatic Gripper Capability |
|---|---|
| Force feedback | None |
| Position feedback | None |
| Robot synchronization | I/O signals only, no protocol connection |
| Cloud data integration | Not supported |
RM-GB Solution
- Programmable control: Supports Modbus, CAN, EtherCAT, and other protocols for direct communication with PLCs and robots.
- Real-time status feedback: Digitally reports gripped, released, dropped, and fault states.
- Remote parameter delivery: During changeovers, parameters are pushed directly from the host system with no on-site operation required.

Core Value: The gripping unit is upgraded from an "isolated actuator" to a "data node on the production line," fully integrated into the automation system architecture.
V. RM-GB Technical Specifications Summary
| Dimension | Conventional Pneumatic Gripper | RM-GB Electric Gripper |
|---|---|---|
| Flexibility | One product, one fixture | One gripper set covers multiple specifications |
| Force control | Coarse pneumatic adjustment, no feedback | Servo closed-loop control with digital force setting |
| Impact | High-speed impact is difficult to avoid | Constant-force approach and impact suppression |
| Communication | Simple I/O | Multi-protocol programmable connection |
| Data | None | Full-process status and parameter traceability |
| Maintenance | Air tube and seal degradation, leak detection difficulty | Electric drive with no air piping maintenance required |
VI. A Realistic Path for Production Line Upgrades
The value of the RM-GB lies not merely in advanced technology, but in its ability to solve specific production line challenges that directly affect throughput, quality, and integration.
| Production Line Challenge | RM-GB Improvement |
|---|---|
| Long changeover times | Parameter switching replaces mechanical changeover |
| Yield fluctuations | Digital force control replaces experience-based pressure adjustment |
| Lack of gripping data | Status feedback connects to MES and SCADA |
| High fixture costs | Reduced number of dedicated fixtures |
| Poor equipment integration | Protocol-based integration into automation systems |
In summary, the RM-GB transforms the gripping process from a production line liability into a flexibility enabler, providing a quantifiable upgrade path for automated production lines that demand high-mix capability, high precision, and rapid changeovers.
This article is based on official RobustMotion product documentation and written from the perspective of automation production line engineering practice.
Planning to Upgrade Your Gripping Process?
Share your workpiece size range, gripping force requirements, and changeover frequency. RobustMotion can help estimate the value of switching to RM-GB electric gripping.