The Hidden Cost of “Good Enough” Force Control
If you’ve spent any time on a modern electronics or automotive assembly floor, you’ve seen the symptoms: cracked camera lenses during smartphone assembly, damaged MEMS sensors in semiconductor handling, inconsistent deburring results on aluminum housings, and the dreaded “over-travel” crashes that send maintenance teams scrambling.
Here’s the uncomfortable truth: Most production lines today are running with force control architectures that were never designed for the precision demands of Industry 4.0.
The Three Critical Gaps in Conventional Systems
Gap 1: The Pneumatic Precision Ceiling
Pneumatic grippers still dominate factory floors for good reason—they’re fast, cheap, and mechanically simple. But their fundamental physics create hard limits:
- Force variance of ±15% due to air pressure fluctuations and temperature changes
- No true programmable force profiles—only crude pressure regulation
- Zero feedback loop—the system doesn’t know if the part was gripped, crushed, or missed entirely
- Minimum force thresholds dictated by static friction; delicate components below 0.5N simply can’t be handled reliably
When you’re assembling smartphone camera modules with <0.01N force tolerances, pneumatic systems aren’t just suboptimal—they’re disqualifying.
Gap 2: The “Sensor-Only” Fallacy
Many engineers assume that adding a six-axis force/torque sensor (100–200Hz sampling) to a standard robot arm solves the precision problem. It doesn’t.
Here’s why: Sensing precision ≠ Control precision.
A sensor detecting 0.01N force variation is like having perfect vision but Parkinson’s disease in your hands. The robot’s mechanical transmission—harmonic drives with 3–10 arcmin backlash, gear reducers with 0.1–0.5N static friction, and flexible couplings—introduces non-linearities that make precise force generation nearly impossible at the end-effector.
The result? You can see the force error, but you can’t correct it fast enough to matter.
Gap 3: The Control Frequency Bottleneck
Standard robot force control loops run at 100–200Hz (5–10ms cycle time). In high-speed assembly applications, that’s an eternity:
- A typical pick-and-place operation completes in 200–500ms
- Contact events happen in <10ms
- By the time your control loop detects an over-force condition, the damage is done
This is the “over-shoot” problem—your system recognizes the error after the lens has already cracked.
SoftForce® 3.0: Re-architecting Force Control from the Ground Up
RobustMotion’s SoftForce® 3.0 represents a fundamental departure from conventional force control approaches. Rather than bolting sensors onto standard mechanical systems, it re-engineers the entire control stack around three core innovations:
1. 10kHz Closed-Loop Control: Speed as a Safety Feature
At 10,000Hz control frequency (0.1ms cycle time), SoftForce® 3.0 operates 50–100× faster than standard robot force control systems. This isn’t incremental improvement—it’s a qualitative change in what’s possible.
What 10kHz enables:
- True “soft landing”: The system detects contact, adjusts force, and stabilizes before mechanical resonance can build
- High-speed precision: Maintain ±0.01N force accuracy even at 10+ Hz motion frequencies—critical for battery cell inspection and high-throughput testing
- Active compliance: Real-time adaptation to part tolerances without stopping the motion profile
2. Model Predictive Control: From Reactive to Anticipatory
SoftForce® 3.0 employs model predictive algorithms rather than traditional PID force control. The system continuously simulates the mechanical dynamics of the actuator-load interaction, predicting force trajectories and adjusting motor torque preemptively.
This approach eliminates the classic force control trade-off: You no longer need to choose between speed and precision. The system can move aggressively toward the target while maintaining force constraints—what RobustMotion calls “high-frequency, high-speed, zero overshoot” operation.
3. Direct-Drive Architecture: Removing the Mechanical Intermediaries
Critical to achieving ±0.01N precision is the elimination of friction and backlash sources:
- No gear reducers: Direct-drive linear motors or precision ball screws transmit force without intermediate stages
- Integrated high-rigidity force sensors: Collocated sensing and actuation minimize phase lag
- Unified mechanical-electrical design: The actuator, sensor, and controller are co-designed as a single dynamic system
This architecture removes the 0.1–0.5N “control dead zones” created by static friction in geared systems—the fundamental barrier that prevents conventional actuators from achieving sub-0.1N precision.
Real-World Impact: Where SoftForce® 3.0 Changes the Economics
Case 1: 3C Electronics Assembly
The Problem: Smartphone camera module assembly requires pressing delicate lens stacks into housings with <0.01N force tolerance. Conventional electric grippers achieve ±0.5N at best; pneumatic systems are unusable. Manual assembly introduces human variability and ergonomic injuries.
The SoftForce® Solution:
- ±0.01N force accuracy (1‰ of full scale) with real-time adjustment
- Soft landing capability: Approach at high speed, decelerate to contact force in milliseconds without impact
- Programmable force profiles: Different recipes for glass vs. plastic components, stored and recalled instantly
Result: Automated assembly of previously “un-automatable” components, with yield rates >99.5% and cycle times competitive with manual operation.
Case 2: Semiconductor Handling
The Problem: Wafer and die handling requires gripping forces of 1–5N with ±0.01N consistency. Too little force = dropped parts ($50,000+ losses). Too much force = cracked dies. Traditional systems can’t maintain precision during acceleration/deceleration.
The SoftForce® Solution:
- Continuous force maintenance: Not just setting force at grip, but actively controlling through the entire motion trajectory
- Instantaneous response to disturbances: Detect and compensate for vibration, inertia changes, or part slippage in real-time
- Anti-overload design: 4–8× improved shock resistance compared to conventional force-controlled actuators
Result: Reliable automation of die bonding and wafer transfer operations previously requiring Class 10 cleanroom technicians.
Case 3: Battery Production
The Problem: Lithium cell “squash testing” and formation processes require rapid, precise force application. Traditional systems either move too slowly for production targets or overshoot and damage cells.
The SoftForce® Solution:
- High-frequency testing: 10+ Hz cycle rates with maintained ±0.01N precision
- Force-position hybrid control: Maintain constant force while tracking position for thickness measurement
- Zero over-shoot: Critical for preventing internal short circuits in pouch cells
The Architecture Decision: When to Specify SoftForce® Technology
For system integrators and automation engineers designing next-generation lines, here’s a practical framework:
| Your Requirement | Conventional Solution | SoftForce® 3.0 |
|---|---|---|
| Force >1N, tolerance ±0.5N | Standard servo with current loop control (±5–15%) | Over-specified; direct-drive alternatives (±3–5%) suffice |
| Force <1N, tolerance ±0.1N | Six-axis sensor + robot arm (±1%, overshoot risks) | Marginal; consider if speed-precision trade-off is acceptable |
| Force <0.1N, tolerance ±0.01N | Manual operation or custom automation | Required—10kHz closed-loop with ±1‰ accuracy |
| High-speed + precision | Compromise on one dimension | Required—10kHz control enables both simultaneously |
| Active compliance / soft robotics | Complex external force control | Native capability through integrated sensing and predictive control |
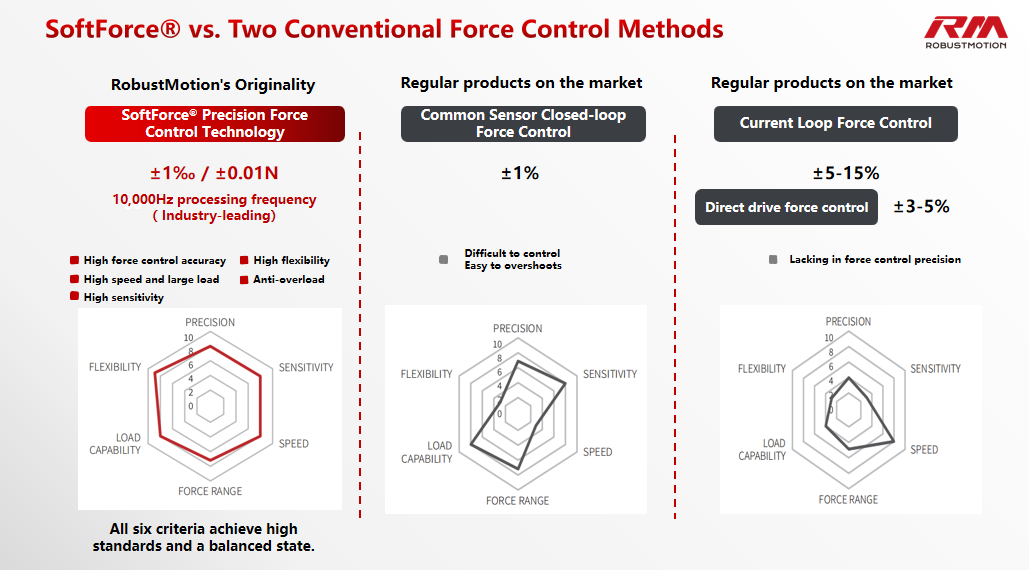
The Technical Hierarchy
Current Loop Control (±5–15%) — Cost-effective for speed-priority applications where force precision is secondary. Direct-drive variants improve to ±3–5%, but lack true force feedback.
Conventional Sensor-Based (±1%) — Adds sensing capability, but mechanical transmission (gears, harmonic drives) creates control dead zones and overshoot issues. Cannot achieve sub-0.1N precision reliably.
SoftForce® Precision Control (±0.01N) — When tolerances tighten to ±1‰, only 10kHz closed-loop architectures can deliver. Eliminates mechanical intermediaries; enables true “soft landing” and high-speed precision without compromise.
Looking Forward: Force Control as a Strategic Capability
The evolution of industrial force control mirrors what happened with machine vision a decade ago: What began as a specialized add-on is becoming a core requirement for competitive manufacturing.
As product miniaturization continues (MEMS, microLEDs, advanced packaging) and as human-robot collaboration expands, the ability to precisely generate forces—not merely sense them—separates world-class automation from commodity integration.
RobustMotion’s SoftForce® 3.0, with its 10kHz control frequency, ±0.01N precision, and direct-drive architecture, represents the current state-of-the-art in commercially available force control technology. For engineers designing assembly systems for 2026 and beyond, it’s worth evaluating whether your current force control architecture is a performance enabler—or the hidden bottleneck limiting your line’s capability.
Technical Specifications Summary
- Control frequency: 10,000Hz (0.1ms loop time)
- Force accuracy: ±0.01N (1‰ FS)
- Architecture: Direct-drive linear/rotary + integrated force sensor + model predictive control
- Applications: 3C assembly, semiconductor handling, medical device manufacturing, battery testing, precision insertion tasks